
Page 25 - 4160
P. 25
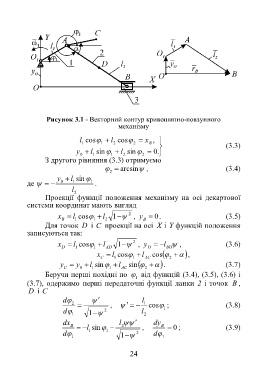
Рисунок 3.1 - Векторний контур кривошипно-повзунного
механізму
l cos l cos x ,
1 1 2 2 B
(3.3)
y sinl l sin .0
0 1 1 2 2
З другого рівняння (3.3) отримуємо
arcsin , (3.4)
2
y l sin
де 0 1 1 .
l
2
Проекції функції положення механізму на осі декартової
системи координат мають вигляд
x l cos l 1 2 , y 0. (3.5)
B 1 1 2 B
Для точок D і C проекції на осі X і Y функцій положення
записуються так:
x l cos l 1 2 , y l , (3.6)
D 1 1 AD D BD
x cosl l cos ,
C 1 1 AC 2
y y sinl l sin . (3.7)
C 0 1 1 AC 2
Беручи перші похідні по від функцій (3.4), (3.5), (3.6) і
1
(3.7), одержимо перші передаточні функції ланки 2 і точок B ,
D і C
d l
2
, 1 cos ; (3.8)
1
d 1 1 2 l 2
dx l dy
B l sin 2 , B 0 ; (3.9)
d 1 1 2 d
1 1 1
24