
Page 214 - 2589
P. 214
T
A
G e B d .
0
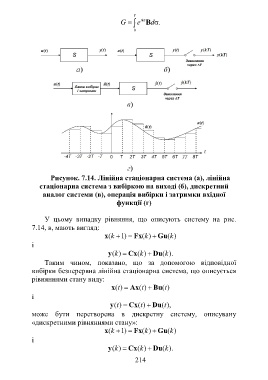
Рисунок. 7.14. Лінійна стаціонарна система (а), лінійна
стаціонарна система з вибіркою на виході (б), дискретний
аналог системи (в), операція вибірки і затримки вхідної
функції (г)
У цьому випадку рівняння, що описують систему на рис.
7.14, в, мають вигляд:
x (k ) 1 Fx (k ) Gu (k )
і
y (k ) Cx (k ) Du (k ).
Таким чином, показано, що за допомогою відповідної
вибірки безперервна лінійна стаціонарна система, що описується
рівняннями стану виду:
x (t ) Ax (t ) Bu (t )
і
y (t ) Cx (t ) Du (t ),
може бути перетворена в дискретну систему, описувану
«дискретними рівняннями стану»:
x (k ) 1 Fx (k ) Gu (k )
і
y (k ) Cx (k ) Du (k ).
214