
Page 216 - 2589
P. 216
6. Перехідна матриця стану.
7. Взаємозв’язок між фундаментальною матрицею і
перехідною матрицею стану.
8. Загальний розв’язок рівняння стану систем високого
порядку.
9. Модифікація при переході до іншого базису.
10. Лінеаризація систем високого порядку.
11. Рівняння стану у сукупній формі.
12. Системи з дискретним часом, їх опис за допомогою
різницевих рівнянь.
13. Дискретна перехідна матриця стану.
14. Дискретні рівняння стану при виборці і затримці на вході
й дискретизації на виході.
15. Періодичні системи їх характеристики і опис.
8.7 Варіанти завдань до практичних занять
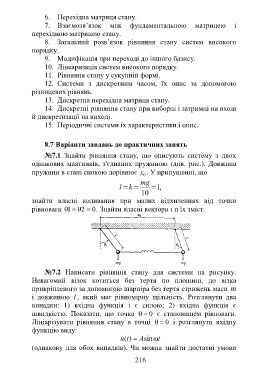
№7.1 Знайти рівняння стану, що описують систему з двох
однакових маятників, з'єднаних пружиною (див. рис.). Довжина
пружини в стані спокою дорівнює x . У припущенні, що
0
mg
l k , 1
10
знайти власні коливання при малих відхиленнях від точки
рівноваги 1 2 . 0 Знайти власні вектори і п їх зміст.
№7.2 Написати рівняння стану для системи на рисунку.
Невагомий візок котиться без тертя по площині, до візка
прикріпленого за допомогою шарніра без тертя стрижень маси m
і довжиною l , який має рівномірну щільність. Розглянути два
випадки: 1) вхідна функція і є силою; 2) вхідна функція є
швидкістю. Показати, що точка 0 є становищем рівноваги.
Лініарізувати рівняння стану в точці 0 і розглянути вхідну
функцію виду:
u( t ) Asin t
(однакову для обох випадків). Чи можна знайти достатні умови
216