
Page 134 - 256_
P. 134
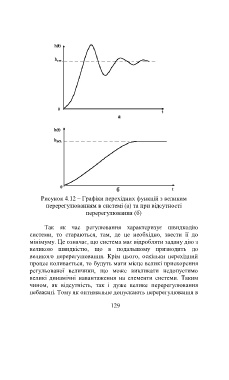
Рисунок 4.12 – Графіки перехідних функцій з великим
перерегулюванням в системі (а) та при відсутності
перерегулювання (б)
Так як час регулювання характеризує швидкодію
системи, то стараються, там, де це необхідно, звести її до
мінімуму. Це означає, що система має відробляти задану дію з
великою швидкістю, що в подальшому призводить до
великого перерегулювання. Крім цього, оскільки перехідний
процес коливається, то будуть мати місце великі прискорення
регульованої величини, що може викликати недопустимо
великі динамічні навантаження на елементи системи. Таким
чином, як відсутність, так і дуже велике перерегулювання
небажані. Тому як оптимальне допускають перерегулювання в
129