
Page 64 - Г
P. 64
СПУ є замкнутою по останній. При відсутності необхідних
вимірювальних перетворювачів спостережувана перемінна
відрізняється від керованої, і СПУ (замкнена по відношенню
спостережуваної змінної) є незамкненою по відношенню
керованої змінної. До останнього відносять більшість СПУ
витрат.
Розрізняють часові (задаються в часі) і параметричні i
(задаються по параметру стану об'єкта) програми. Звичайно
програму розділяють на ділянки, у межах яких програмна
зміна величини, що задається, може бути описана
функціональною залежністю з постійними коефіцієнтами,
тобто для часової програми функція ( )на одній ділянці
(див. рівняння (1)) структурно і параметрично залишається
)
незмінною. Ділянки програми по виду функції (y , де y –
параметр завдання (для часових програм параметр завдання
час τ) розділяють на лінійні чи нелінійні, а за знаком зміни
змінної, яка задається – на ділянки зростання (підйому),
ділянки спадання (спаду) і ділянки витримки. Можливий
випадок, коли програма задається у вигляді декількох ділянок
витримки (рис. 3.5, а), а умови переходу від однієї ділянки
витримки до іншої не обмежуються.
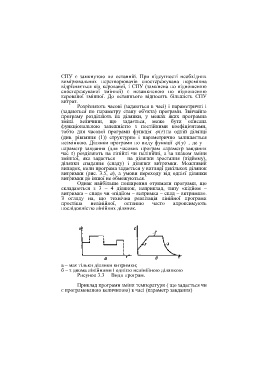
Однак найбільше поширення отримали програми, що
складаються з 3 – 4 ділянок, наприклад, типу «підйом –
витримка – спад» чи «підйом – витримка – спад – витримка».
З огляду на, що технічна реалізація лінійної програми
простіша нелінійної, останню часто апроксимують
послідовністю лінійних ділянок.
а – має тільки ділянки витримки;
б – з двома лінійними і однією нелінійною ділянкою
Рисунок 3.3 – Види програм.
Приклад програми зміни температури ( що задається чи
є програмованою величиною) в часі (параметр завдання)