
Page 190 - Векерик В
P. 190
186
2
де F – площа сідла, см ; δP max – максимальний перепад тиску на регулюючому
c
органі.
При подачі потоку «на затвор» зусилля на більшій частині ходу постійне,
а наприкінці ходу (поблизу положення закриття) зростає в декілька разів, у
закритому положенні його величина зменшується до початкової:
N F c P при l<0.9 і l = 1; N n F c P при 9.0 l , 1
max
де n – кратність пікового зростання зусилля.
Рівняння (9.8) – (9.10) складають модель пневматичного мембранно-
пружинного ВМ без допоміжних блоків. У динаміці ця модель виявляє
характерні особливості – інерційність, запізнення, схильність до автоколивань.
Ці властивості визначаються в основному структурними особливостями моделі,
наявністю визначених ланок і зв'язків між ними.
Математична модель у такому вигляді є нелінійною і корисна для
дослідження впливу всіх складових на характер руху вихідного елемента ВМ.
Таке дослідження найпростіше виконати шляхом структурного моделювання,
наприклад, у прикладному пакеті Matlab в інструментарії Simulink. Дана модель
малопридатна для практичного використання при синтезі АСК. Для цієї мети
доцільніше застосувати модель (9.8) приведену вище.
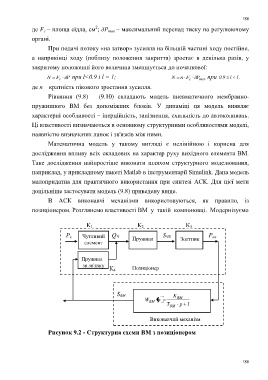
В АСК виконавчі механізми використовуються, як правило, із
позиціонером. Розглянемо властивості ВМ у такій компоновці. Модернізуємо
К К К
1 2 3
Р Р
к Чутливий Q Ч Пружина S ЧЕ Золтник кп
елемент Е
Пружина
зв.зв'язку
К 4 Позиціонер
S ВМ K
W ВМ p ВМ
T ВМ p 1
Виконавчий механізм
Рисунок 9.2 - Структурна схеми ВМ з позиціонером
186