
Page 194 - Векерик В
P. 194
190
контролерів (наприклад, контролери серії Реміконт та Ломіконт) формують
алгоритми керування з врахуванням інтегральної складової ЕдВМ. Це
характерно для приводів, які не мають позиціонерів.
Позиціонери можуть реалізовуватись програмно з використанням
структури мікропроцесорних регуляторів і контролерів, або апаратно, як
додаткові блоки приводів. Практично всі ЕдВМ фірм Fisher,Honeywell,Samson
та інших комплектуються електронними позиціонерами.Деякі виробники
апаратних регуляторів, наприклад ПП "Мікрол", розробляє алгоритми
керування, які дозволяють реалізувати програмні позиціонери при імпульсному
керуванні ЕдВМ. В обох випадках закон керування в контурі АСК формується
без врахування динаміки приводу.
Розглянемо детальніше роботу ЕдВМ сумісно з позиціонером у режимі
імпульсного керування.
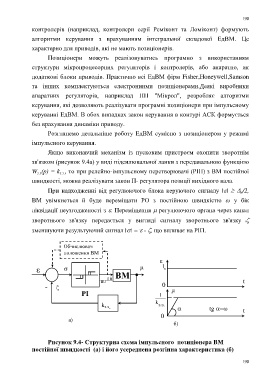
Якщо виконавчий механізм із пусковим пристроєм охопити зворотнім
зв'язком (рисунок 9.4а) у виді підсилювальної ланки з передавальною функцією
W (р) = k , то при релейно-імпульсному перетворювачі (РІП) з ВМ постійної
з.з
з.з.
швидкості, можна реалізувати закон П- регулятора позиції вихідного вала.
При надходженні від регулюючого блока керуючого сигналу | | н /2,
ВМ увімкнеться й буде переміщати РО з постійною швидкістю ω у бік
ліквідації неузгодженості з . Переміщення регулюючого органа через канал
зворотнього зв'язку передається у вигляді сигналу зворотнього зв'язку
зменшуючи результуючий сигнал | | = - , що впливає на РІП.
Обчислювач
положення ВМ
1
1
ВМ
- 0 t
РІ 1
П k з.з. k з.з. tg =ω
0 t
а)
б)
Рисунок 9.4- Структурна схема імпульсного позиціонера ВМ
постійної швидкості (а) і його усереднена розгінна характеристика (б)
190