
Page 195 - Векерик В
P. 195
191
При | | < /2 - П виконавчий механізм вимкнеться. Таким чином, при
н
кожній зміні | | > /2 ВМ буде переміщати РО , ліквідуючи з точністю
н
| | < н /2 відхилення від керуючого сигналу .
Оскільки сигнал зворотного зв'язку = k з.з. ,, то в усталеному режимі
= - k .з.з. < /2 (9.20)
н
Так як зона нечутливості РІП н має невелике значення, то вираз (9.20)
приблизно можна записати у виді
= k .з.з. = 0 .
Тому передавальна функція імпульсного регулятора -позиціонера з ВМ
сталої швидкості набуває вигляду:
W ВМ-П (p) = M(p)/E(p) = 1/ k (9.21)
з.з.
Таким чином, імпульсний регулятор-позиціонер з ВМ постійної
швидкості зі структурою схемою, приведеної на рисунок 9.4а, приблизно
реалізує безінерційну ланку з коефіцієнтом передачі 1/ k .
з.з.
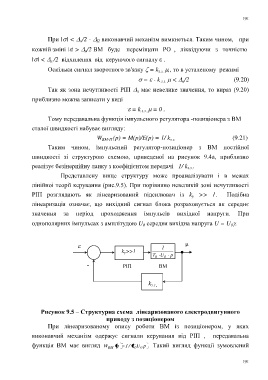
Представлену вище структуру може проаналізувати і в межах
лінійноі теорії керування (рис.9.5). При порівняно невеликій зоні нечутливості
РІП розглядають як лінеаризований підсилювач із k >> 1. Подібна
у
лінеаризація означає, що вихідний сигнал блока розраховується як середнє
значення за період проходження імпульсів вихідної напруги. При
однополярних імпульсах з амплітудою U середня вихідна напруга U = U .
0
0
1
k y>>1
T 0 U 0 p
- РІП ВМ
k з.з.
Рисунок 9.5 – Структурна схема лінеаризованого електродвигунного
приводу з позиціонером
При лінеаризованому опису роботи ВМ із позиціонером, у яких
виконавчий механізм одержує сигнали керування від РІП , передавальна
функція ВМ має вигляд W BM p / 1 T 0 U 0 p . Такий вигляд функції зумовлений
191