
Page 45 - Міністерство освіти України
P. 45
переміщення = f(t) має вигляд ламаної лінії 3 (рисунок 7.3, в). Ця ламана
лінія може бути, приблизно, замінена прямою 4, причому, чим менше
тривалість одного ввімкнення t релейного елемента і тривалість паузи
імп
t пауз . тим точніше збігається дійсний закон 3 зміни (t) з лінеаризованої
прямої 4.
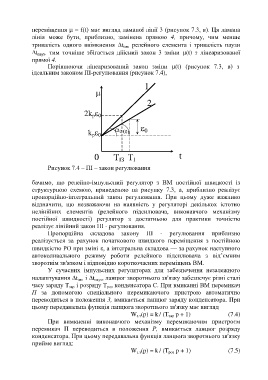
Порівнюючи лінеаризований закон зміни (t) (рисунок 7.3, в) з
ідеальним законом ПІ-регулювання (рисунок 7.4),
1
2
2k р 0
k р 0 2 1 0
0 T ІЗ Т І t
Рисунок 7.4 – ПІ – закон регулювання
бачимо, що релейно-імпульсний регулятор з ВМ постійної швидкості із
структурною схемою, приведеною на рисунку 7.3, а, приблизно реалізує
пропорційно-інтегральний закон регулювання. При цьому дуже важливо
відзначити, що незважаючи на наявність у регуляторі декількох істотно
нелінійних елементів (релейного підсилювача, виконавчого механізму
постійної швидкості) регулятор з достатньою для практики точністю
реалізує лінійний закон ПІ - регулювання.
Пропорційна складова закону ПІ - регулювання приблизно
реалізується за рахунок початкового швидкого переміщення з постійною
швидкістю РО при зміні , а інтегральна складова — за рахунок наступного
автоколивального режиму роботи релейного підсилювача з від’ємним
зворотнім зв'язком і відповідно короткочасних переміщень ВМ.
У сучасних імпульсних регуляторах для забезпечення незалежного
налаштування t і t пауз , ланцюг зворотнього зв'язку забезпечує різні сталі
імп
часу заряду Т і розряду Т конденсатора С. При вмиканні ВМ перемикач
роз
зар
П за допомогою спеціального перемикаючого пристрою автоматично
переводиться в положення 3, вмикається ланцюг заряду конденсатора. При
цьому передавальна функція ланцюга зворотнього зв'язку має вигляд
W (p) = k / (T p + 1) (7.4)
з.з
зар
При вимкненні виконавчого механізму перемикаючим пристроєм
перемикач П переводиться в положення Р, вмикається ланцюг розряду
конденсатора. При цьому передавальна функція ланцюга зворотнього зв'язку
прийме вигляд:
W (p) = k / (T p + 1) (7.5)
роз
з.з