
Page 106 - 126
P. 106
z
z
zy zx
dz
yz xz
xy x
y yx
х
dy
y dx
Рис.4.1
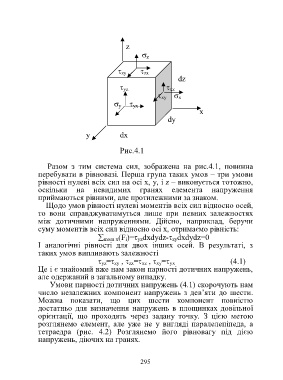
Разом з тим система сил, зображена на рис.4.1, повинна
перебувати в рівновазі. Перша група таких умов – три умови
рівності нулеві всіх сил на осі х, у, і z – виконується тотожно,
оскільки на невидимих гранях елемента напруження
приймаються рівними, але протилежними за знаком.
Щодо умов рівності нулеві моментів всіх сил відносно осей,
то вони справджуватимуться лише при певних залежностях
між дотичними напруженнями. Дійсно, наприклад, беручи
суму моментів всіх сил відносно осі х, отримаємо рівність:
mom x(F i)= yzdxdydz- zydxdydz=0
І аналогічні рівності для двох інших осей. В результаті, з
таких умов випливають залежності
yz= zy , zx= xz , xy= yx (4.1)
Це і є знайомий вже нам закон парності дотичних напружень,
але одержаний в загальному випадку.
Умови парності дотичних напружень (4.1) скорочують нам
число незалежних компонент напружень з дев’яти до шести.
Можна показати, що цих шести компонент повністю
достатньо для визначення напружень в площинках довільної
орієнтації, що проходять через задану точку. З цією метою
розглянемо елемент, але уже не у вигляді паралелепіпеда, а
тетраедра (рис. 4.2) Розглянемо його рівновагу під дією
напружень, діючих на гранях.
295