
Page 42 - 68
P. 42
Теоретична механіка
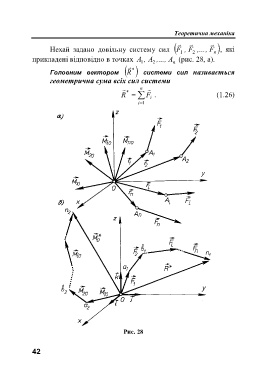
Нехай задано довільну систему сил F , F , ... , F , які
1 2 n
прикладені відповідно в точках A 1 , A 2 , ..., A (рис. 28, а).
n
*
Головним вектором R системи сил називається
геометрична сума всіх сил системи
n
R * F . (1.26)
i
i 1
Рис. 28
42