
Page 22 - 68
P. 22
Теоретична механіка
1.1 Система збіжних сил
Система збіжних сил – це система сил, лінії дії яких
перетинаються в одній точці.
§ 7 Зведення системи збіжних сил
до канонічного вигляду
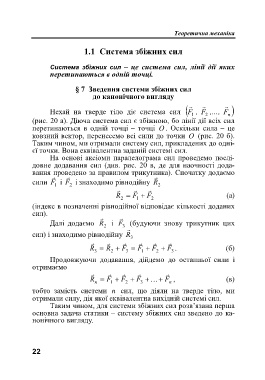
Нехай на тверде тіло діє система сил F , F , ... , F
1 2 n
(рис. 20 а). Діюча система сил є збіжною, бо лінії дії всіх сил
перетинаються в одній точці – точці O . Оскільки сила – це
ковзний вектор, перенесемо всі сили до точки O (рис. 20 б).
Таким чином, ми отримали систему сил, прикладених до одні-
єї точки. Вона еквівалентна заданій системі сил.
На основі аксіоми паралелограма сил проведемо послі-
довне додавання сил (див. рис. 20 в, де для наочності дода-
вання проведено за правилом трикутника). Спочатку додаємо
сили F і F і знаходимо рівнодійну R
1 2 2
R F F (а)
2 1 2
(індекс в позначенні рівнодійної відповідає кількості доданих
сил).
Далі додаємо R і F (будуючи знову трикутник цих
2
3
сил) і знаходимо рівнодійну R
3
R R F F F F . (б)
3
3
2
1
2
3
Продовжуючи додавання, дійдемо до останньої сили і
отримаємо
R F F F F , (в)
n 1 2 3 n
тобто замість системи n сил, що діяли на тверде тіло, ми
отримали силу, дія якої еквівалентна вихідній системі сил.
Таким чином, для системи збіжних сил розв’язана перша
основна задача статики – систему збіжних сил зведено до ка-
нонічного вигляду.
22