
Page 112 - 68
P. 112
Теоретична механіка
Координату z об’ємного тіла визначимо, якщо тіло по-
C
вернемо на кут 90 навколо горизонтальної осі і зробимо по-
вторне зважування.
Серед аналітичних методів визначення положення
центра ваги виділимо:
Спосіб розбиття
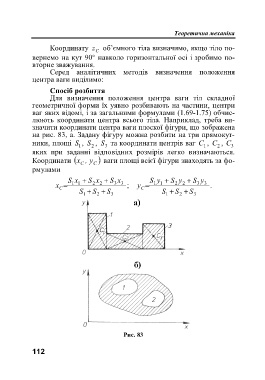
Для визначення положення центра ваги тіл складної
геометричної форми їх уявно розбивають на частини, центри
ваг яких відомі, і за загальними формулами (1.69-1.75) обчис-
люють координати центра всього тіла. Наприклад, треба ви-
значити координати центра ваги плоскої фігури, що зображена
на рис. 83, а. Задану фігуру можна розбити на три прямокут-
ники, площі S , S , S та координати центрів ваг C , C , C
1
3
1
2
3
2
яких при заданні відповідних розмірів легко визначаються.
Координати x C , y C ваги площі всієї фігури знаходять за фо-
рмулами
S x S x S x S y S y S y
x 1 1 2 2 3 3 ; y 1 1 2 2 3 3 .
C C
S S S 3 S S S 3
1
2
2
1
Рис. 83
112