
Page 138 - 5637
P. 138
цикл повторюється, тобто знову змінюється аргумент і т. д. Ітераційний процес
пошуку закінчується, коли зміна аргументу перестає приводити до зміни цільової
функції.
Як видно з опису, метод почергового зміни змінних є природним застосуванням
одновимірного пошуку до вирішення завдання багатовимірної оптимізації та
ефективність його істотно залежить від того, який метод використовується при
проведенні одновимірних оптимізації кожного компонента вектора параметрів функції
. B принципі для цих цілей можна використовувати будь-який досить ефективний
метод одно-параметричної параметризації. Наприклад, за умови існування похідних
досить часто застосовується метод найшвидшого спуску [58, 60]. Відповідний варіант
методу наступної зміни змінних зазвичай називають алгоритмом Гауса-Зейделя.
Метод послідовної зміни координат має ряд переваг – він досить простий для
практичного використання, а крім того, інваріантний щодо вибору масштабів по
кожній координатної осі. До нестачі методу слід віднести залежність ефективності
пошуку від розташування поверхонь рівня ( ) щодо осей системи координат
, … , . Зокрема, метод послідовної зміни координат слід визнати неефективним
для вирішення завдань оптимізації, в яких безліч значень цільової функції має
структуру типу поверхні з гребенем.
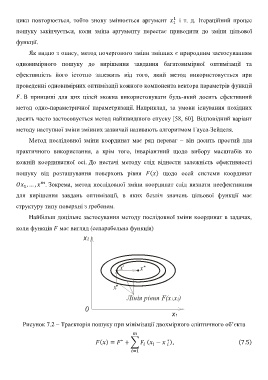
Найбільш доцільне застосування методу послідовної зміни координат в задачах,
коли функція має вигляд (сепарабельна функція)
x2
x x*
x
Лінія рівня F(x x )1, 2
0
x1
Рисунок 7.2 – Траєкторія пошуку при мінімізації двохмірного еліптичного об’єкта
∗
∗
( ) = + ( − ), (7.5)