
Page 24 - 4733
P. 24
4 Фінальна практична робота
РОЗРАХУНОК ПАРАМЕТРІВ ПРОПОРЦІЙНО – ІНТЕГРАЛЬНО –
ДИФЕРЕНЦІЙНОГО РЕГУЛЯТОРА ОБ’ЄКТУ КЕРУВАННЯ ІЗ ЗАДАНИМИ
ДИНАМІЧНИМИ ВЛАСТИВОСТЯМИ
Розрахувати параметри пропорційно – інтегрально – диференційного (ПІД) регулятора в
системі автоматичного керування двигуна постійного струму, робота якого описується
передавальною функцією інтегруючої реальної ланки 1-го порядку із транспортним запізненням
b e p
виду: W ( ) p 0 . Значення параметрів передавальної функції даного об’єкта керування для
a p a
1 0
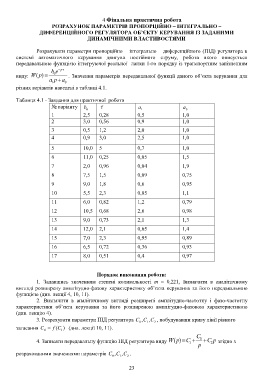
різних варіантів наведені в таблиці 4.1.
Таблиця 4.1 - Завдання для практичної роботи
№ варіанту b a a
0 1 0
1 2,5 0,28 0,5 1,0
2 3,0 0,56 0,9 1,0
3 0,5 1,2 2,0 1,0
4 0,9 3,0 2,5 1,0
5 10,0 5 0,7 1,0
6 11,0 0,25 0,05 1,5
7 2,0 0,96 0,04 1,9
8 7,5 1,5 0,09 0,75
9 9,0 1,8 0,6 0,95
10 5,5 2,3 0,85 1,1
11 6,0 0,82 1,2 0,79
12 10,5 0,68 2,6 0,98
13 9,0 0,73 2,1 1,3
14 12,0 2,1 0,65 1,4
15 7,0 2,3 0,95 0,89
16 6,5 0,72 0,36 0,93
17 8,0 0,51 0,4 0,97
Порядок виконання роботи:
1. Задавшись значенням степені коливальності m = 0,221, визначити в аналітичному
вигляді розширену амплітудно-фазову характеристику об’єкта керування за його передавальною
функцією (див. лекції 4, 10, 11).
2. Визначити в аналітичному вигляді розширені амплітудно-частотну і фазо-частотну
характеристики об’єкта керування за його розширеною амплітудно-фазовою характеристикою
(див. лекцію 4).
3. Розрахувати параметри ПІД регулятора C ,C ,C , побудувавши криву лінії рівного
0 1 2
загасання C f (C ) (див. лекції 10, 11).
0 1
C
4. Записати передавальну функцію ПІД регулятора виду W( p) C 0 C 2 p згідно з
1
p
розрахованими значеннями параметрів C ,C ,C .
0 1 2
23