
Page 25 - 4733
P. 25
5. Дослідити роботу двигуна на тренажері з отриманими параметрами ПІД-регулятора.
Для цього:
5.1. Зайти за допомогою веб-переглядача на адресу www.vlab.nung.edu.ua/SAC.
5.2.Задати загальні параметри тренажера (режим роботи: run; вимірюваний параметр:
Speed; розмір буфера: 10 с, децимація: 1) і параметри його задаючого (генерованого) сигналу (тип
сигналу: прямокутний; амплітуда: 2 рад; частота: 0,1 Гц; зсув сигналу: 0 рад; частота
дискретизації: 100 Гц), як показано на рис. 4.1.
Рисунок 4.1 - Панель задання загальних параметрів тренажера
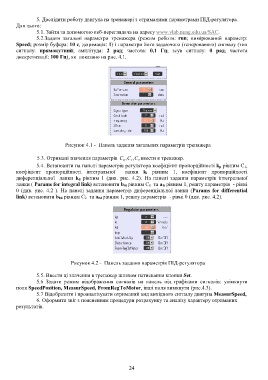
5.3. Отримані значення параметрів C ,C ,C ввести в тренажер.
0 1 2
5.4. Встановити на панелі параметрів регулятора коефіцієнт пропорційності k p рівним С 1,
коефіцієнт пропорційності інтегральної ланки k і рівним 1, коефіцієнт пропорційності
диференціальної ланки k d рівним 1 (див. рис. 4.2). На панелі задання параметрів інтегральної
ланки ( Params for integral link) встановити b 0i рівним С 0 та a 1i рівним 1, решту параметрів - рівні
0 (див. рис. 4.2 ). На панелі задання параметрів диференціальної ланки (Params for differential
link) встановити b 0d рівним С 2 та a 0d рівним 1, решту параметрів - рівні 0 (див. рис. 4.2).
Рисунок 4.2 - Панель задання параметрів ПІД-регулятора
5.5. Ввести ці значення в тренажер шляхом натискання кнопки Set.
5.6 Задати режим відображення сигналів на панель під графіками сигналів: увімкнути
поля SpeedPosition, MeasurSpeed, FromRegToMotor, інші поля вимкнути (рис.4.3).
5.7 Відобразити і проаналізувати отриманий вид вихідного сигналу двигуна MeasurSpeed,
6. Оформити звіт з поясненням процедури розрахунку та аналізу характеру отриманих
результатів.
24