
Page 224 - 4694
P. 224
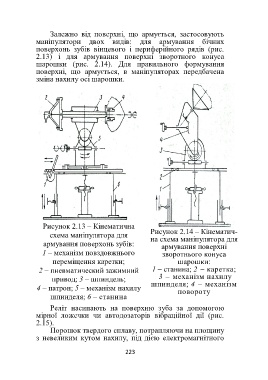
Залежно від поверхні, що армується, застосовують
маніпулятори двох видів: для армування бічних
поверхонь зубів вінцевого і периферійного рядів (рис.
2.13) і для армування поверхні зворотного конуса
шарошки (рис. 2.14). Для правильного формування
поверхні, що армується, в маніпуляторах передбачена
зміна нахилу осі шарошки.
Рисунок 2.13 – Кінематична
схема маніпулятора для Рисунок 2.14 – Кінематич-
армування поверхонь зубів: на схема маніпулятора для
армування поверхні
1 – механізм повздовжнього зворотнього конуса
переміщення каретки; шарошки:
2 – пневматический зажимний 1 – станина; 2 – каретка;
привод; 3 – шпиндель; 3 – механізм нахилу
4 – патрон; 5 – механізм нахилу шпинделя; 4 – механізм
повороту
шпинделя; 6 – станина
Реліт насипають на поверхню зуба за допомогою
мірної ложечки чи автодозаторів вібраційної дії (рис.
2.15).
Порошок твердого сплаву, потрапляючи на площину
з невеликим кутом нахилу, під дією електромагнітного
223