
Page 21 - 4523
P. 21
y K 1 K 1 , (1.4)
або
y K 1 K 1 . (1.5)
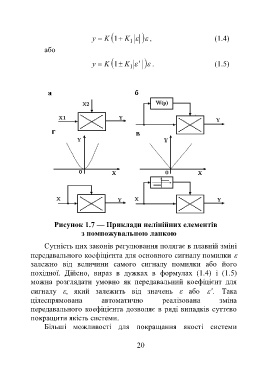
Рисунок 1.7 — Приклади нелінійних елементів
з помножувальною ланкою
Сутність цих законів регулювання полягає в плавній зміні
передавального коефіцієнта для основного сигналу помилки
залежно від величини самого сигналу помилки або його
похідної. Дійсно, вираз в дужках в формулах (1.4) і (1.5)
можна розглядати умовно як передавальний коефіцієнт для
сигналу , який залежить від значень або . Така
цілеспрямована автоматично реалізована зміна
передавального коефіцієнта дозволяє в ряді випадків суттєво
покращити якість системи.
Більші можливості для покращання якості системи
20