
Page 16 - 4523
P. 16
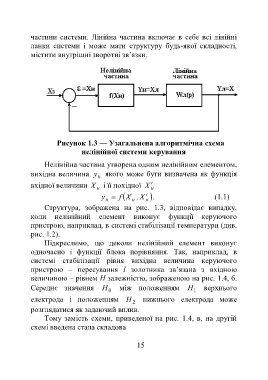
частини системи. Лінійна частина включає в себе всі лінійні
ланки системи і може мати структуру будь-якої складності,
містити внутрішні зворотні зв’язки.
Рисунок 1.3 — Узагальнена алгоритмічна схема
нелінійної системи керування
Нелінійна частина утворена одним нелінійним елементом,
вихідна величина y якого може бути визначена як функція
н
вхідної величини X і її похідної X
н
н
y f X н X , н . (1.1)
н
Структура, зображена на рис. 1.3, відповідає випадку,
коли нелінійний елемент виконує функції керуючого
пристрою, наприклад, в системі стабілізації температури (див.
рис. 1.2).
Підкреслимо, що деколи нелінійний елемент виконує
одночасно і функції блока порівняння. Так, наприклад, в
системі стабілізації рівня вихідна величина керуючого
пристрою – пересування l золотника зв’язана з вхідною
величиною – рівнем Н залежністю, зображеною на рис. 1.4, б.
Середнє значення H між положенням H верхнього
1
0
електрода і положенням H нижнього електрода може
2
розглядатися як задаючий вплив.
Тому замість схеми, приведеної на рис. 1.4, в, на другій
схемі введена стала складова
15