
Page 17 - 4523
P. 17
l l l .
o
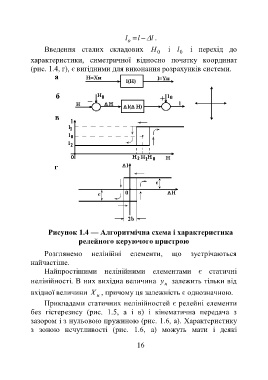
Введення сталих складових H і l і перехід до
0
0
характеристики, симетричної відносно початку координат
(рис. 1.4, г), є вигідними для виконання розрахунків системи.
Рисунок 1.4 — Алгоритмічна схема і характеристика
релейного керуючого пристрою
Розглянемо нелінійні елементи, що зустрічаються
найчастіше.
Найпростішими нелінійними елементами є статичні
нелінійності. В них вихідна величина y залежить тільки від
н
вхідної величини X , причому ця залежність є однозначною.
н
Прикладами статичних нелінійностей є релейні елементи
без гістерезису (рис. 1.5, а і в) і кінематична передача з
зазором і з нульовою пружиною (рис. 1.6, а). Характеристику
з зоною нечутливості (рис. 1.6, а) можуть мати і деякі
16