
Page 18 - 4523
P. 18
електронні, магнітні і гідравлічні підсилювачі.
Підкреслимо, що нечутливість вимірювальних елементів
робить систему “грубою”, але покращує її стійкість.
В динамічних нелінійностях вихідна величина y
н
залежить як від вхідної величини X , так і від її похідної X .
н
н
Характеристика динамічної нелінійності завжди
неоднозначна.
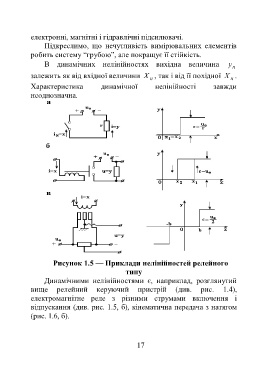
Рисунок 1.5 — Приклади нелінійностей релейного
типу
Динамічними нелінійностями є, наприклад, розглянутий
вище релейний керуючий пристрій (див. рис. 1.4),
електромагнітне реле з різними струмами включення і
відпускання (див. рис. 1.5, б), кінематична передача з натягом
(рис. 1.6, б).
17