
Page 13 - 4523
P. 13
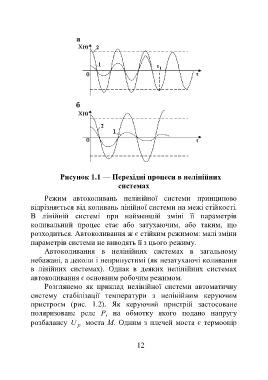
Рисунок 1.1 — Перехідні процеси в нелінійних
системах
Режим автоколивань нелінійної системи принципово
відрізняється від коливань лінійної системи на межі стійкості.
В лінійній системі при найменшій зміні її параметрів
коливальний процес стає або затухаючим, або таким, що
розходиться. Автоколивання ж є стійким режимом: малі зміни
параметрів системи не виводять її з цього режиму.
Автоколивання в нелінійних системах в загальному
небажані, а деколи і неприпустимі (як незатухаючі коливання
в лінійних системах). Однак в деяких нелінійних системах
автоколивання є основним робочим режимом.
Розглянемо як приклад нелінійної системи автоматичну
систему стабілізації температури з нелінійним керуючим
пристроєм (рис. 1.2). Як керуючий пристрій застосоване
поляризоване реле Р, на обмотку якого подано напругу
розбалансу U моста М. Одним з плечей моста є термоопір
p
12