
Page 56 - 4399
P. 56
d L
Рівняння M , як і рівняння (5.6), називають основним
dt
рівнянням динаміки обертального руху матеріальної
точки.
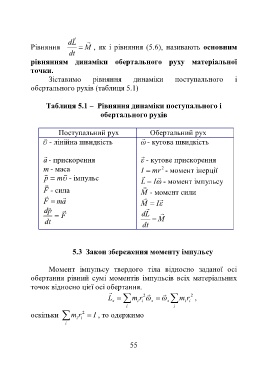
Зіставимо рівняння динаміки поступального і
обертального рухів (таблиця 5.1)
Таблиця 5.1 – Рівняння динаміки поступального і
обертального рухів
Поступальний рух Обертальний рух
- лінійна швидкість - кутова швидкість
a - прискорення - кутове прискорення
m - маса I mr - момент інерції
2
p m - імпульс
L I - момент імпульсу
F - сила
M - момент сили
F m a M I
p d
F d L
dt M
dt
5.3 Закон збереження моменту імпульсу
Момент імпульсу твердого тіла відносно заданої осі
обертання рівний сумі моментів імпульсів всіх матеріальних
точок відносно цієї осі обертання.
2
2
L m r m r ,
z i i z z i i
i i
2
оскільки m i r I , то одержимо
i
i
55