
Page 12 - 4160
P. 12
Замінні механізми. Під час вивчення структури і
кінематики плоских механізмів зручно замінити вищі
кінематичні пари на ланцюги з нижчими кінематичними парами.
Але при цьому треба задовольнити умови структурної та
кінематичної еквівалентності замінного та реального механізмів:
- замінний механізм повинен мати такий самий ступінь
вільності;
- відносний рух ланок не повинен змінитися.
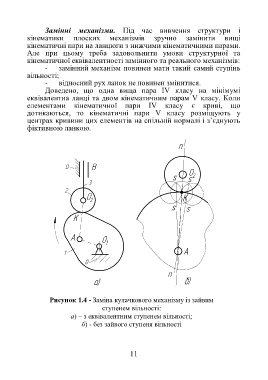
Доведено, що одна вища пара IV класу на мінімумі
еквівалентна ланці та двом кінематичним парам V класу. Коли
елементами кінематичної пари IV класу є криві, що
дотикаються, то кінематичні пари V класу розміщують у
центрах кривини цих елементів на спільній нормалі і з’єднують
фіктивною ланкою.
Рисунок 1.4 - Заміна кулачкового механізму із зайвим
ступенем вільності:
а) – з еквівалентним ступенем вільності;
б) - без зайвого ступеня вільності
11