
Page 18 - 169
P. 18
+ - ~
+ +
U y U в
Y Vs
U з G M
- M c -
n
U n
BR
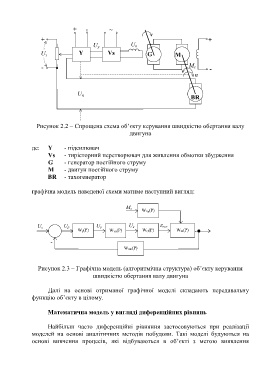
Рисунок 2.2 – Спрощена схема об’єкту керування швидкістю обертання валу
двигуна
де: Y - підсилювач
Vs - тирісторний перетворювач для живлення обмотки збудження
G - генератор постійного струму
M - двигун постійного струму
BR - тахогенератор
графічна модель наведеної схеми матиме наступний вигляд:
М с
W Vs(P)
U з U р U у U в ген
W у(P) W Vs(P) W G(P) W M(P)
-
W BR(P)
Рисунок 2.3 – Графічна модель (алгоритмічна структура) об’єкту керування
швидкістю обертання валу двигуна
Далі на основі отриманої графічної моделі складають передавальну
функцію об’єкту в цілому.
Математична модель у вигляді диференційних рівнянь
Найбільш часто диференційні рівняння застосовуються при реалізації
моделей на основі аналітичних методів побудови. Такі моделі будуються на
основі вивчення процесів, які відбуваються в об’єкті з метою виявлення