
Page 82 - Г
P. 82
деякою помилкою y пом y кр y будуть відслідковувати
а
траєкторію і, отже, y . Помилка відстеження траєкторії
кр
y кр ( ) викликає відхилення траєкторії (x ) від оптимальної,
однак наближення до границі y кр ( ) збільшує небезпеку
виникнення в АПД критичних режимів при випадкових
впливах.
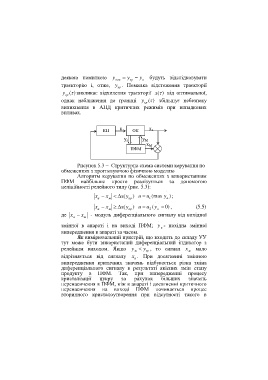
КП u ОК x a
y a y M
x M
ПФМ
Рисунок 5.3 – Структурна схема системи керування по
обмеженнях з прогнозуючою фізичною моделлю
Алгоритм керування по обмеженнях з використанням
ПФМ найбільше просто реалізується за допомогою
нелінійності релейного типу (рис. 5.3):
x а x м x (y кр ) u u 1 (max y а ) ;
x а x м x (y кр ) u u 2 (y а ) 0 , (5.5)
де x а x - модуль диференціального сигналу від вихідної
м
змінної в апараті і на виході ПФМ; y - похідна змінної
а
випередження в апараті за часом.
Як вимірювальний пристрій, що входить до складу УУ
тут може бути використаний диференціальний індикатор з
релейним виходом. Якщо y м y , то сигнал x мало
кр
м
відрізняється від сигналу x . При досягненні змінною
а
випередження критичних значень відбувається різка зміна
диференціального сигналу в результаті якісних змін стану
продукту в ПФМ. Так, при випередженні процесу
кристалізації цукру за рахунок більших значень
перенасичення в ПФМ, ніж в апараті і досягненні критичного
перенасичення на виході ПФМ починається процес
вторинного кристалоутворення при відсутності такого в