
Page 148 - 128
P. 148
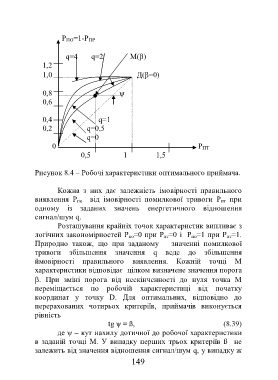
Р ПО=1-Р ПР
q=4 q=2 M()
1,2
1,0 Д(=0)
0,8
0,6
0,4 q=1
0,2 q=0,5
q=0
0 Р ПТ
0,5 1 1,5
Рисунок 8.4 – Робочі характеристики оптимального приймача.
Кожна з них дає залежність імовірності правильного
виявлення Р по від імовірності помилкової тривоги Р пт при
одному із заданих значень енергетичного відношення
сигнал/шум q.
Розташування крайніх точок характеристик випливає з
логічних закономірностей Р по=0 при Р пт=0 і Р по=1 при Р пт=1.
Природно також, що при заданому значенні помилкової
тривоги збільшення значення q веде до збільшення
ймовірності правильного виявлення. Кожній точці М
характеристики відповідає цілком визначене значення порога
. При зміні порога від нескінченності до нуля точка М
переміщається по робочій характеристиці від початку
координат у точку D. Для оптимальних, відповідно до
перерахованих чотирьох критеріїв, приймачів виконується
рівність
tg ψ = ß, (8.39)
де ψ – кут нахилу дотичної до робочої характеристики
в заданій точці М. У випадку перших трьох критеріїв ß не
залежить від значення відношення сигнал/шум q, у випадку ж
149