
Page 146 - 128
P. 146
з можливих сигналів сприйнятий. Значення можливих
сигналів, що характеризуються їхніми апріорними
ймовірностями й енергіями, грають у схемі оптимального
приймача роль зсувів.
Найпростішим з можливих випадків прийому
дискретних повідомлень є так назване бінарне виявлення.
Воно відповідає випадку прийому бінарного коду – нуля чи
одиниці, тобто
х 0(t)=0; x 1(t)=u c(t). (8.33)
У цьому випадку зважується, чи мається на вході
приймача сигнал u c(t) (і шум) чи сигнал відсутній (тобто існує
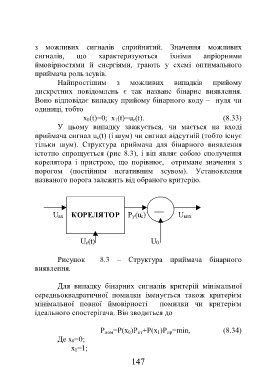
тільки шум). Структура приймача для бінарного виявлення
істотно спрощується (рис 8.3), і він являє собою сполучення
корелятора і пристрою, що порівнює, отримане значення з
порогом (постійним негативним зсувом). Установлення
названого порога залежить від обраного критерію.
__
КОРЕЛЯТОР
_
U вх Ру(u c) U вих
Uc(t) U0
Рисунок 8.3 – Структура приймача бінарного
виявлення.
Для випадку бінарних сигналів критерій мінімальної
середньоквадратичної помилки іменується також критерієм
мінімальної повної ймовірності помилки чи критерієм
ідеального спостерігача. Він зводиться до
Р пом=Р(х 0)Р пт+Р(х 1)Р пр=min, (8.34)
Де х 0=0;
х 1=1;
147