
Page 19 - 6718
P. 19
боди, зазвичай, представляють у вигляді вектора, який називають вектором ву-
злових переміщень.
Матриця жорсткості системи формується з матриць жорсткості елементів.
В програмних комплексах, які реалізують алгоритм методу скінченних елемен-
тів, ці матриці зберігаються у готовому вигляді. Матриці жорсткості елементів
можуть формуватись та зберігатись в пам’яті ЕОМ у власних локальних систе-
мах координат. Оскільки матриця жорсткості системи встановлює зв'язок між
силами, прикладеними до її вузлів, та переміщеннями вузлів, то наявність по-
будованої матриці жорсткості системи та відомі значення вузлового наванта-
ження дозволяють визначити переміщення всі вузлів скінченно-елементної
схеми. Для цього необхідно розв’язати систему алгебраїчних рівнянь вигляду
u k F F , (1.10)
м 0
де uk - матриця вузлових переміщень системи;
F - вектор зовнішніх сил;
м
F - вузловий вектор початкових сил (наприклад, коли необхідно врахувати
0
початкові температурні напруження).
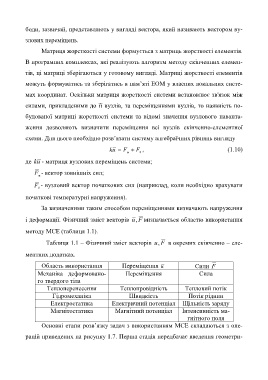
За визначеними таким способом переміщеннями визначають напруження
і деформації. Фізичний зміст векторів u, F визначається областю використання
методу МСЕ (таблиця 1.1).
Таблиця 1.1 – Фізичний зміст векторів u, F в окремих скінченно – еле-
ментних додатках.
Область використання Переміщення u Сили F
Механіка деформовано- Переміщення Сила
го твердого тіла
Теплоперенесення Теплопровідність Тепловий потік
Гідромеханіка Швидкість Потік рідини
Електростатика Електричний потенціал Щільність заряду
Магнітостатика Магнітний потенціал Інтенсивність ма-
гнітного поля
Основні етапи розв’язку задач з використанням МСЕ складаються з опе-
рацій приведених на рисунку 1.7. Перша стадія передбачає введення геометри-