
Page 158 - 6625
P. 158
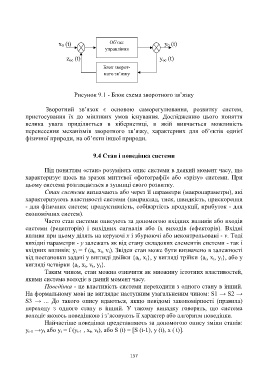
Об’єкт
x 0 (t) у 0 (t)
управління
z ос (t) y ос (t)
Блок зворот-
ного зв’язку
Рисунок 9.1 - Блок схема зворотного зв’язку
Зворотний зв’язок є основою саморегулювання, розвитку систем,
пристосування їх до мінливих умов існування. Дослідженню цього поняття
велика увага приділяється в кібернетиці, в якій вивчається можливість
перенесення механізмів зворотного зв’язку, характерних для об’єктів однієї
фізичної природи, на об’єкти іншої природи.
9.4 Стан і поведінка системи
Під поняттям «стан» розуміють опис системи в деякий момент часу, що
характеризує щось на зразок миттєвої «фотографії» або «зрізу» системи. При
цьому система розглядається в зупинці свого розвитку.
Стан системи визначають або через її параметри (макропараметри), які
характеризують властивості системи (наприклад, тиск, швидкість, прискорення
- для фізичних систем; продуктивність, собівартість продукції, прибуток - для
економічних систем).
Часто стан системи описують за допомогою вхідних впливів або входів
системи (рецепторів) і вихідних сигналів або їх виходів (ефекторів). Вхідні
впливи при цьому ділять на керуючі x і збурюючі або неконтрольовані - v. Тоді
вихідні параметри - y залежать як від стану складових елементів системи - так і
вхідних впливів: y t = f (a t, x t, v t). Звідси стан може бути визначено в залежності
від постановки задачі у вигляді двійки {a t, x t}, у вигляді трійки {a t, x t, y t}, або у
вигляді четвірки {a t, x t, v t, y t}.
Таким чином, стан можна означити як множину істотних властивостей,
якими система володіє в даний момент часу.
Поведінка - це властивість системи переходити з одного стану в інший.
На формальному мові це виглядає наступним узагальненим чином: S1 → S2 →
S3 → ... До такого опису вдаються, якщо невідомі закономірності (правила)
переходу з одного стану в інший. У такому випадку говорять, що система
володіє якоюсь поведінкою і з’ясовують її характер або алгоритм поведінки.
Найчастіше поведінка представляють за допомогою опису зміни станів:
y t-1 →y t або y t = f (y t-1 , x t, v t), або S (t) = [S (t-1), y (t), x ( t)].
157