
Page 19 - 4979
P. 19
l sin l sin l sin ,
OA 1 1 AB 2 2 O 1B 3 3
l cos l cos l cos ,
OA 1 1 AB 2 2 O 1B 3 3
l sin l sin 0 , (1.8)
O 1C 3 3 CD 4 4
l cos l cos V .
O1 C 3 3 CD 4 4 D
Після диференціювання отримали систему лінійних
рівнянь з невідомими швидкостями , , і V .
2 3 4 D
Системи рівнянь (1.3) і (1.8) або (1.6), (1.7) і (1.8)
розв’язуємо разом за допомогою пакета програм Mathcad.
Написання програми. При написанні програми, на
початку, необхідно вказати числові значення заданих
параметрів. Далі організовуємо цикл обчислень, адже
необхідно виконати обчислення для заданого числа положень
вхідної ланки механізму. Наприклад, якщо для організації
циклу обчислень ми створюємо ранжирувану змінну – номер
положення вхідної ланки n з нульовим початковим
значенням, кроком 1 і кінцевим значенням 12 , то на екрані
цей запис буде виглядати так: :n 0, 1.. 12 .
Значення кута , для відповідного номера положення
1
вхідної ланки, у тексті програми запишеться так:
де - кут, який визначає нульове положення кривошипа;
0
2 / n - крок зміни кута .
1
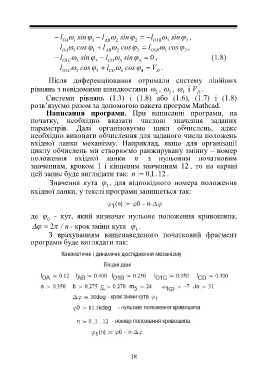
З врахуванням вищенаведеного початковий фрагмент
програми буде виглядати так:
18