
Page 18 - 4845
P. 18
E
B
ω 2
2
D
ω 3
A
3
φ 1
ω 1
1
O C
p υ,о,с p υ,о,с p υ,о,с
a) б) СВ
АВ в)
ОА
a a a
p υ,о,с ВЕ p υ,о,с p υ,о,с
b b b
АЕ
г) д) e е)
a a a
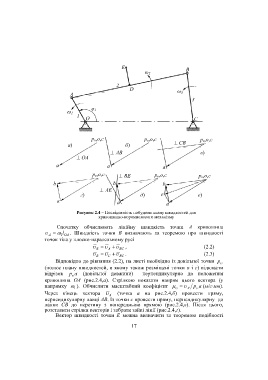
Рисунок 2.4 – Послідовність побудови плану швидкостей для
кривошипно-коромислового механізму
Спочатку обчислюють лінійну швидкість точки А кривошипа
А = 1 l OA . Швидкість точки В визначають за теоремою про швидкості
точок тіла у плоско-паралельному русі
ВС , (2.2)
В
А
ВС . (2.3)
В
С
Відповідно до рівняння (2.2), на листі необхідно із довільної точки p
(полюс плану швидкостей, в якому також розміщені точки о і c) відкласти
відрізок p а (довільної довжини) перпендикулярно до положення
кривошипа ОА (рис.2.4,а). Стрілкою показати напрям цього вектора (у
напрямку ). Обчислити масштабний коефіцієнт = А р а (м/с·мм).
1
Через кінець вектора (точка а на рис.2.4,б) провести пряму,
А
перпендикулярну ланці АВ. Із точки с провести пряму, перпендикулярну до
ланки СВ до перетину з попередньою прямою (рис.2.4,в). Після цього,
розставити стрілки векторів і забрати зайві лінії (рис.2.4,г).
Вектор швидкості точки Е можна визначити за теоремою подібності
17