
Page 17 - 480
P. 17
системи електроживлення зануреного електродвигуна, а також
ланкою множення, входи якої з’єднані з виходами перетворювачів.
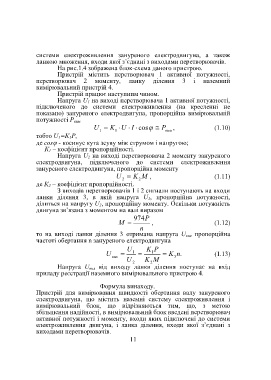
На рис.1.4 зображена блок-схема даного пристрою.
Пристрій містить перетворювач 1 активної потужності,
перетворювач 2 моменту, ланку ділення 3 і наземний
вимірювальний пристрій 4.
Пристрій працює наступним чином.
Напруга U 1 на виході перетворювача 1 активної потужності,
підключеного до системи електроживлення (на кресленні не
показано) зануреного електродвигуна, пропорційна вимірювальній
потужності Р вим
U K U I cos P , (1.10)
1 1 вим
тобто U 1=К 1Р,
де cos - косинус кута зсуву між струмом і напругою;
К 1 – коефіцієнт пропорційності.
Напруга U 2 на виході перетворювача 2 моменту зануреного
електродвигуна, підключеного до системи електроживлення
зануреного електродвигуна, пропорційна моменту
U K M , (1.11)
2 2
де К 2 – коефіцієнт пропорційності.
З виходів перетворювачів 1 і 2 сигнали поступають на входи
ланки ділення 3, в якій напруга U 1, пропорційна потужності,
ділиться на напругу U 2, пропорційну моменту. Оскільки потужність
двигуна зв’язана з моментом на валі виразом
974 Р
М , (1.12)
n
то на виході ланки ділення 3 отримана напруга U вих пропорційна
частоті обертання n зануреного електродвигуна
U K P
U 1 1 K . n (1.13)
вих 3
U K M
2 2
Напруга U вих від виходу ланки ділення поступає на вхід
приладу реєстрації наземного вимірювального пристрою 4.
Формула винаходу.
Пристрій для вимірювання швидкості обертання валу зануреного
електродвигуна, що містить наземні систему електроживлення і
вимірювальний блок, що відрізняються тим, що, з метою
збільшення надійності, в вимірювальний блок введені перетворювач
активної потужності і моменту, входи яких підключені до системи
електроживлення двигуна, і ланка ділення, входи якої з’єднані з
виходами перетворювачів.
11