
Page 14 - 480
P. 14
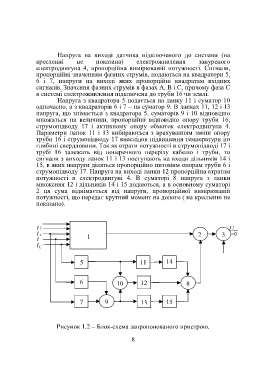
Напруга на виході датчика підключеного до системи (на
кресленні не показана) електроживлення зануреного
електродвигуна 4, пропорційна вимірюваній потужності. Сигнали,
пропорційні значенням фазних струмів, подаються на квадратори 5,
6 і 7, напруги на виході яких пропорційні квадратам вхідних
сигналів. Значення фазних струмів в фазах А, В і С, причому фаза С
в системі електроживлення підключена до труби 16 чи землі.
Напруга з квадратора 5 подається на ланку 11 і суматор 10
одночасно, а з квадраторів 6 і 7 – на суматор 9. В ланках 11, 12 і 13
напруга, що знімається з квадратора 5, суматорів 9 і 10 відповідно
множаться на величини, пропорційні відповідно опору труби 16,
струмопідводу 17 і активному опору обмоток електродвигуна 4.
Параметри ланок 11 і 13 вибираються з врахуванням зміни опору
труби 16 і струмопідводу 17 внаслідок підвищення температури по
глибині свердловини. Так як втрати потужності в струмопідводі 17 і
трубі 16 залежать від поперечного перерізу кабелю і труби, то
сигнали з виходу ланок 11 і 13 поступають на входи дільників 14 і
15, в яких напруги діляться пропорційно питомим опорам труби 6 і
струмопідводу 17. Напруга на виході ланки 12 пропорційна втратам
потужності в електродвигуні 4. В суматорі 8 напруга з ланки
множення 12 і дільників 14 і 15 додаються, а в основному суматорі
2 ця сума віднімається від напруги, пропорційної вимірюваній
потужності, що передає крутний момент на долото ( на кресленні не
показано).
U U ви
I A 1 2 3
I
I C
5 11 14
6 10 12 8
7 9 13 15
Рисунок 1.2 – Блок-схема запропонованого пристрою.
8