
Page 115 - 480
P. 115
T
T
T
AK+KA +BS 0B -KC S 1 CK=0 (2.8)
qo
Шукана матриця К являє собою так звану коваріаційну (або
дисперсійну) матрицю похибок оцінювання
T
К=cov(, )=M{, },
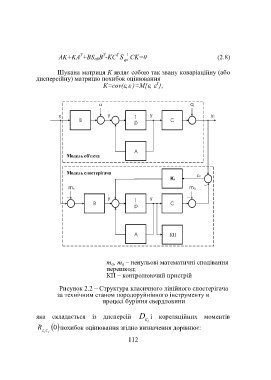
m , m q – ненульові математичні сподівання
перешкод;
КП – контролюючий пристрій
Рисунок 2.2 – Структура класичного лінійного спостерігача
за технічним станом породоруйнівного інструменту в
процесі буріння свердловини
яка складається із дисперсій D і кореляційних моментів
i
R 0 похибок оцінювання згідно визначення дорівнює:
i j
112