
Page 113 - 480
P. 113
n m
y t C y t d x qt t , і=1, 2, ..., l, (2.4)
ci ij j ij i i
j 1 j 1
де
T
y c(t)=[ y c1(t), y c2(t), ..., y cl(t)] – l – мірний вектор вихідних
змінних об’єкту;
T
q(t)=[ q 1(t), q 2(t), ..., q l(t)] – l – мірний вектор збурень, що
діють на виході об’єкту;
С=[c ij] lxn, D=[d ij] lxn – матриці постійних коефіцієнтів, що
характеризують безінерційний вплив змінних стану і керуюючих
впливів на вхід об’єкту.
Матриця спостереження С відображає статичні передавальні
властивості як самого контрольного об’єкта так і вимірювального
пристрою за допомогою якого отримують вихідні сигнали y c.
Вектор збурень q містить також і перешкоди, що виникають
у вимірювальному просторі.
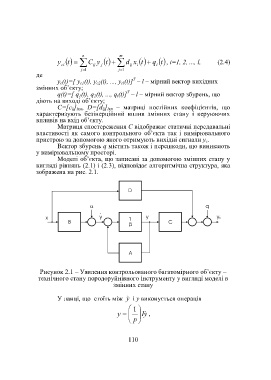
Моделі об’єкта, що записані за допомогою змінних стану у
вигляді рівнянь (2.1) і (2.3), відповідає алгоритмічна структура, яка
зображена на рис. 2.1.
Рисунок 2.1 – Уявлення контрольованого багатомірного об’єкту –
технічного стану породоруйнівного інструменту у вигляді моделі в
змінних стану
У ланці, що стоїть між y і у виконується операція
1
y y I ,
p
110