
Page 180 - 4655
P. 180
c
D
C
A
а б
в г
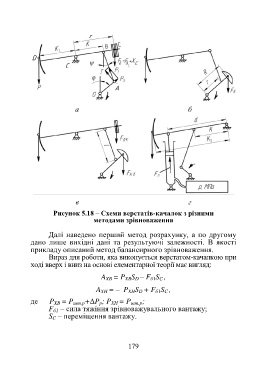
Рисунок 5.18 – Схеми верстатів-качалок з різними
методами зрівноваження
Далі наведено перший метод розрахунку, а по другому
дано лише вихідні дані та результуючі залежності. В якості
прикладу описаний метод балансирного зрівноваження.
Вираз для роботи, яка виконується верстатом-качалкою при
ході вверх і вниз на основі елементарної теорії має вигляд:
A XB = P XBS D – F б1S C ,
A XH = – P XHS D + F б1S C ,
де P XB = P шт.р+ΔP р; P XН = P шт.р;
F б1 – сила тяжіння зрівноважувального вантажу;
S C – переміщення вантажу.
179