
Page 29 - 4523
P. 29
тому, що змінюється права частина рівняння (1.12).
Приклад 1. Побудуємо фазовий портрет і оцінимо
динаміку системи стабілізації температури (див. рис. 1.2).
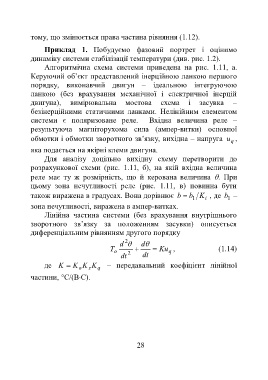
Алгоритмічна схема системи приведена на рис. 1.11, а.
Керуючий об’єкт представлений інерційною ланкою першого
порядку, виконавчий двигун – ідеальною інтегруючою
ланкою (без врахування механічної і електричної інерцій
двигуна), вимірювальна мостова схема і засувка –
безінерційними статичними ланками. Нелінійним елементом
системи є поляризоване реле. Вхідна величина реле –
результуюча магніторухома сила (ампер-витки) основної
обмотки і обмотки зворотного зв’язку, вихідна – напруга u ,
q
яка подається на якірні клеми двигуна.
Для аналізу доцільно вихідну схему перетворити до
розрахункової схеми (рис. 1.11, б), на якій вхідна величина
реле має ту ж розмірність, що й керована величина . При
цьому зона нечутливості реле (рис. 1.11, в) повинна бути
також виражена в градусах. Вона дорівнює b b 1 K , де b –
i
1
зона нечутливості, виражена в ампер-витках.
Лінійна частина системи (без врахування внутрішнього
зворотного зв’язку за положенням засувки) описується
диференціальним рівнянням другого порядку
2
d d
T o Ku , (1.14)
q
dt 2 dt
де K K o K з K – передавальний коефіцієнт лінійної
q
частини, С/(ВС).
28