
Page 72 - 4168
P. 72
1
цільової функції Z = 123534.Аналогічно виконуємо наступні
кроки.
Сьомий крок: Q K 0 1 = 0 , Q 7 K 2 = 700кВАр. Значення цільо-
7
вої функції Z = 66870 у.е.
Восьмий крок: Q K 0 1 = 0 , Q K 8 2 = 800 кВАр. Значення цільо-
8
вої функції Z = 69361 у.е.
Очевидно, що ”спуск” по координаті Q доцільно зупи-
K
2
8
7
нити, оскільки Z > Z , і повернутись до значень змінних
Q K 0 1 = 0 , Q 7 K 2 = 700кВАр, отриманих на сьомому кроці.
Виконаємо новий крок λ = 100 кВАр в напрямку другої
змінної Q : Q 1 K 1 = 100 кВАр, Q K 7 2 = 700кВАр. Значення цільо-
K
1
9
вої функції Z = 64928. Q K 2 1 = 200 кВАр, Q K 7 2 = 700кВАр. Зна-
10
чення цільової функції Z = 68101.
Подальше переміщення в напрямку змінної Q недоці-
K
1
льне, оскільки Z > Z .
9
10
Далі знову продовжуємо переміщатись по змінній Q .
K
2
Тоді отримаємо оптимальну точку з координатами Q = 300
K
1
кВАр, Q K 2 = 500 кВАр, яка знаходиться в області мінімуму
цільової функції Z = 63223. При прийнятій довжині кроку
λ = 100 кВАр не можливо отримати більш точніший розв'язок.
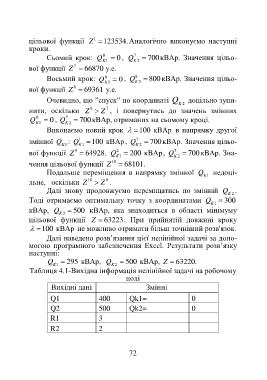
Далі наведено розв’язання цієї нелінійної задачі за допо-
могою програмного забезпечення Excel. Результати розв’язку
наступні:
Q = 295 кВАр, Q K 2 = 500 кВАр, Z = 63220.
K
1
Таблиця 4.1-Вихідна інформація нелінійної задачі на робочому
полі
Вихідні дані Змінні
Q1 400 Qk1= 0
Q2 500 Qk2= 0
R1 3
R2 2
72