
Page 85 - 256_
P. 85
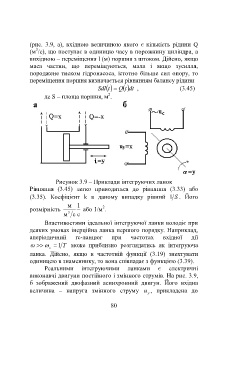
(рис. 3.9, а), вхідною величиною якого є кількість рідини Q
3
(м /с), що поступає в одиницю часу в порожнину циліндра, а
вихідною – переміщення l (м) поршня з штоком. Дійсно, якщо
маса частин, що переміщуються, мала і якщо зусилля,
породжене тиском гідронасоса, істотно більше сил опору, то
переміщення поршня визначається рівнянням балансу рідини
Sdl Qt dtt , (3.45)
2
де S – площа поршня, м .
Рисунок 3.9 – Приклади інтегруючих ланок
Рівняння (3.45) легко приводиться до рівняння (3.33) або
(3.35). Коефіцієнт k в даному випадку рівний 1 S . Його
м 1 2
розмірність або 1/м .
м 3 с с
Властивостями ідеальної інтегруючої ланки володіє при
деяких умовах інерційна ланка першого порядку. Наприклад,
аперіодичний rc-ланцюг при частотах вхідної дії
1 T може приблизно розглядатись як інтегруюча
c
ланка. Дійсно, якщо в частотній функції (3.19) знехтувати
одиницею в знаменнику, то вона співпадає з функцією (3.39).
Реальними інтегруючими ланками є електричні
виконавчі двигуни постійного і змінного струмів. На рис. 3.9,
б зображений двофазний асинхронний двигун. Його вхідна
величина – напруга змінного струму u , прикладена до
y
80