
Page 32 - 169
P. 32
x ) (t x i
t i
a) б)
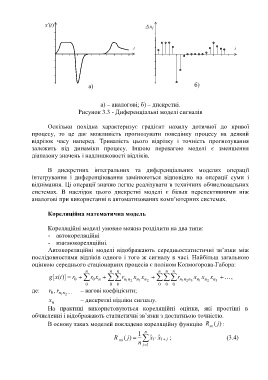
а) – аналогові; б) – дискретні.
Рисунок 3.3 - Диференціальні моделі сигналів
Оскільки похідна характеризує градієнт нахилу дотичної до кривої
процесу, то це дає можливість прогнозувати поведінку процесу на деякий
відрізок часу наперед. Тривалість цього відрізку і точність прогнозування
залежить від динаміки процесу. Іншою перевагою моделі є зменшення
діапазону значень і надлишковості відліків.
В дискретних інтегральних та диференціальних моделях операції
інтегрування і диференціювання замінюються відповідно на операції суми і
віднімання. Ці операції значно легше реалізувати в технічних обчислювальних
системах. В наслідок цього дискретні моделі є більш перспективними ніж
аналогові при використанні в автоматизованих комп’ютерних системах.
Кореляційна математична модель
Кореляційні моделі умовно можна розділити на два типи:
- автокореляційні
- взаємокореляційні.
Автокореляційні моделі відображають середньостатистичні зв’язки між
послідовностями відліків одного і того ж сигналу в часі. Найбільш загальною
оцінкою середнього стаціонарних процесів є поліном Колмогорова-Габора:
n n n n n n
r
r
g[ x( t)] r 0 0 x n n 1 n 2 x n 1 x n 2 n 1 n 2 n 3 x n 1 x n 2 x n 3 ,
r
0 0 0 0 0 0
де: r , r – вагові коефіцієнти;
n
0
1 n 2
x – дискретні відліки сигналу.
n
На практиці використовуються кореляційні оцінки, які простіші в
обчисленні і відображають статистичні зв’язки з достатньою точністю.
В основу таких моделей покладено кореляційну функцію R xx ( ) j :
1 n
R ( j) i xx j ; (3.4)
xx i
n
i 1