
Page 15 - Міністерство освіти і науки України
P. 15
рівнянням е t 1 t 1 t T 0 , застосувавши до якого
перетворення Лапласа, дістанемо передавальну функцію
екстраполятора
1 1 1 e T 0 s
W e s L e t s s e T 0 s s . (1.6)
1.7 Різницеві рівняння
Для математичного опису динаміки дискретних систем
автоматичного керування використовують різницеві рівняння,
які є аналогами диференціальних рівнянь. Такі рівняння
визначають співвідношення між дискретною решітчастою
функцією у [пТ 0] та її різницями різних порядків. Перехід від
диференціальних рівнянь до різницевих грунтується на заміні
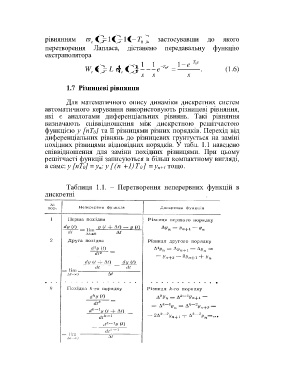
похідних різницями відповідних порядків. У табл. 1.1 наведено
співвідношення для заміни похідних різницями. При цьому
решітчасті функції записуються в більш компактному вигляді,
а саме: у [пТ 0] = у п; у [(п +1) Т 0 ] = у п+1 тощо.
Таблиця 1.1. – Перетворення неперервних функцій в
дискретні