
Page 45 - Семенцов Г
P. 45
y(x) 1
0.75 1
0.5
2
0.25
0
-1 -0.5 0 0.5 1
x
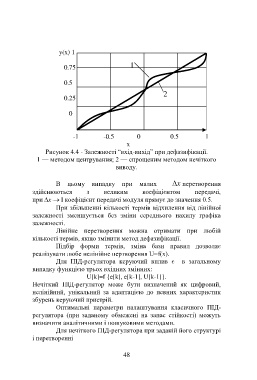
Рисунок 4.4 - Залежності “вхід-вихід” при дефазифікації.
1 — методом центрування; 2 — спрощеним методом нечіткого
виводу.
В цьому випадку при малих x перетворення
здійснюються з великим коефіцієнтом передачі,
при x 1 коефіцієнт передачі модуля прямує до значення 0.5.
При збільшенні кількості термів відхилення від лінійної
залежності зменшується без зміни середнього нахилу графіка
залежності.
Лінійне перетворення можна отримати при любій
кількості термів, якщо змінити метод дефазифікації.
Підбір форми термів, зміна бази правил дозволяє
реалізувати любе нелінійне пертворення U=f(x).
Для ПІД-регулятора керуючий вплив є в загальному
випадку функцією трьох вхідних змінних:
U[k]=f {e[k], e[k-1], U[k-1]}.
Нечіткий ПІД-регулятор може бути визначений як цифровий,
нелінійний, унікальний за адаптацією до певних характеристик
збурень керуючий пристрій.
Оптимальні параметри налаштування класичного ПІД-
регулятора (при заданому обмежені на запас стійкості) можуть
визначити аналітичними і пошуковими методами.
Для нечіткого ПІД-регулятора при заданій його структурі
і перетворенні
48