
Page 23 - Семенцов Г
P. 23
автоматичного керування процесом. Вперше такий алгоритм був
застосований для регулювання швидкості обертання валу і тиску
пари в бойлері парової машини.
В наступних публікаціях були синтезовані нечіткі
алгоритми керування об`єктами різної природи: хімічним
реактором, теплообмінником, конвекторною установкою та ін.
Детальну бібліографію див. в роботі (1).
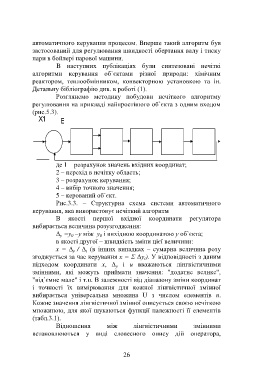
Розглянемо методику побудови нечіткого алгоритму
регулювання на прикладі найпростішого об`єкта з одним входом
(рис.5.3).
Х 1 Е
1 2 3 4 5
де 1 – розрахунок значень вхідних координат;
2 – перехід в нечітку область;
3 – розрахунок керування;
4 – вибір точного значення;
5 – керований об`єкт.
Рис.3.3. – Структурна схема системи автоматичного
керування, яка використовує нечіткий алгоритм
В якості першої вхідної координати регулятора
вибирається величина розузгодження:
Δ у =у 0 –у між у 0 і вихідною координатою у об`єкта;
в якості другої – швидкість зміни цієї величини:
х = Δ у / Δ t (в інших випадках – сумарна величина розу
згоджується за час керування х = Σ Δу і ). У відповідності з даним
підходом координати х, Δ у і и вважаються лінгвістичними
змінними, які можуть приймати значення: "додатне велике",
"від`ємне мале" і т.п. В залежності від діапазону зміни координат
і точності їх вимірювання для кожної лінгвістичної змінної
вибирається універсальна множина U з числом елементів п.
Кожне значення лінгвістичної змінної описується своєю нечіткою
множиною, для якої шукаються функції належності її елементів
(табл.3.1).
Відношення між лінгвістичними змінними
встановлюються у виді словесного опису дій оператора,
26