
Page 24 - Семенцов Г
P. 24
наприклад "якщо ВІДХИЛЕННЯ ТЕМПЕРАТУРИ – велике, а
ШВИДКІСТЬ ЗМІНИ – середня, то ПОДАЧА ПАЛИВА – мала".
Сукупність подібних правил складає нечіткий алгоритм
керування. У випадку, коли лінгвістичні змінні Δ у і х приймають
значення у і і х і , а керування и – значення и і , правила можуть бути
записані у виді:
"якщо Δ у = у і і х = х і , то и = и і ; інакше..." (3.3)
де j = 1, m (m – число правил регулювання).
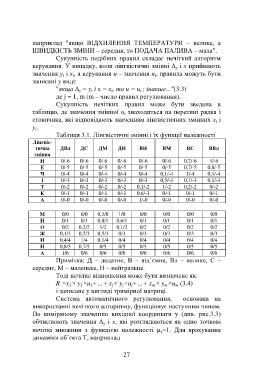
Сукупність нечітких правил може бути зведена в
таблицю, де значення змінної и і знаходиться на перетині рядка і
стовпчика, які відповідають значенням лінгвістичних змінних х і і
у і .
Таблиця 3.1. Лінгвістичні змінні і їх функції належності
Лінгвіс-
тична ДВл ДС ДМ ДН ВН ВМ ВС ВВл
змінна
Н 0/-6 0/-6 0/-6 0/-6 0/-6 0/-6 0,2/-6 1/-6
Е 0/-5 0/-5 0/-5 0/-5 0/-5 0/-5 0,7/-5 0,8/-5
Ч 0/-4 0/-4 0/-4 0/-4 0/-4 0,1/-4 1/-4 0,4/-4
І 0/-3 0/-3 0/-3 0/-3 0/-3 0,5/-3 0,7/-3 0,1/-3
Т 0/-2 0/-2 0/-2 0/-2 0,1/-2 1/-2 0,2/-2 0/-2
К 0/-1 0/-1 0/-1 0/-1 0,6/-1 0/-1 0/-1 0/-1
А 0/-0 0/-0 0/-0 0/-0 1/-0 0/-0 0/-0 0/-0
М 0/0 0/0 0,3/0 1/0 0/0 0/0 0/0 0/0
Н 0/1 0/1 0,8/1 0,6/1 0/1 0/1 0/1 0/1
О 0/2 0,2/2 1/2 0,1/2 0/2 0/2 0/2 0/2
Ж 0,1/3 0,7/3 0,5/3 0/3 0/3 0/3 0/3 0/3
И 0,4/4 1/4 0,1/4 0/4 0/4 0/4 0/4 0/4
Н 0,8/5 0,7/5 0/5 0/5 0/5 0/5 0/5 0/5
А 1/6 0/6 0/6 0/6 0/6 0/6 0/6 0/6
Примітка: Д – додатне, В – від`ємне, Вл – велике, С –
середнє, М – маленьке, Н – нейтральне.
Тоді нечітке відношення може бути визначене як:
R =х 1 × y 1 ×u 1 +…+ х j × y j ×u j +…+ х m × y m ×u m (3.4)
і записане у вигляді тримірної матриці.
Система автоматичного регулювання, основана на
використанні нечіткого алгоритму, функціонує наступним чином.
По виміряному значенню вихідної координати у (див. рис.3.3)
обчислюють значення Δ у і х, які розглядаються як одно точкові
нечіткі множини з функцією належності s =1. Для врахування
динаміки об`єкта Т, наприклад
27