
Page 17 - Семенцов Г
P. 17
НЛР
e (t ) 0 P u (t )
щ 0 (t ) А
ПІ - НР
0 y (t )
або
1 P
d ПД - НР 0 g (P ) y ) (t
dt
2 P або du
d 2 ПІД - НР dt
dt 2
В
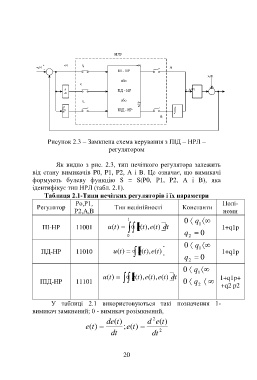
Рисунок 2.3 – Замкнена схема керування з ПІД – НРЛ –
регулятором
Як видно з рис. 2.3, тип нечіткого регулятора залежить
від стану вимикачів P0, P1, P2, A і B. Це означає, що вимикачі
формують булеву функцію S = S(P0, P1, P2, A і B), яка
ідентифікує тип НРЛ (табл. 2.1).
Таблиця 2.1-Типи нечітких регуляторів і їх параметри
Ро,Р1, Полі-
Регулятор Тип нелінійності Константи
Р2,А,В номи
1 0 q
ПІ-НР 11001 u( t) e( t), e( t) dt 1 1+q1p
0 q 2 0
0 q
ПД-НР 11010 u (t ) e (t ),e (t ) 1 1+q1p
q 2 0
0 q 1
u( t) e( t), e( t), e( t) dt 1+q1p+
ПІД-НР 11101 0 q 2 +q2 p2
У таблиці 2.1 використовуються такі позначення 1-
вимикач замкнений; 0 - вимикач розімкнений,
de (t ) d 2 e (t )
e (t ) ;e (t )
dt dt 2
20