
Page 16 - Семенцов Г
P. 16
Цей регулятор може бути описаний такими алгоритмами
функціонування
P(k+1) = f[ω(k), u(k), y(k)], (2.6)
x(k+1) = g[x (k), ω (k), p(k), y(k)], (2.7)
u(k) = h[p(k), ω(k), y(k), x(k)], (2.8)
де k – дискретний змінний час.
Замкнена система керування, що містить ПІД – і НРЛ –
регулятори приведена на рис. 2.3.
Система, що розглядається, складається з ПІД – і НРЛ –
регулятора і лінійної динамічної ланки з передавальною
функцією:
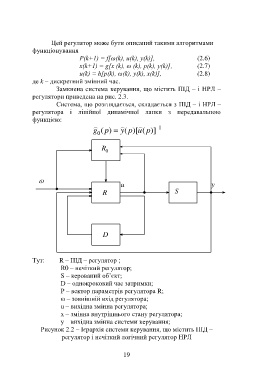
g 0 ( ) p y (p )[u (p )] 1
R 0
u y
R S
D
Тут: R – ПІД – регулятор ;
R0 – нечіткий регулятор;
S – керований об’єкт;
D – однокроковий час затримки;
P – вектор параметрів регулятора R;
ω – зовнішній вхід регулятора;
u – вихідна змінна регулятора;
x – змінна внутрішнього стану регулятора;
y – вихідна змінна системи керування;
Рисунок 2.2 – Ієрархія системи керування, що містить ПІД –
регулятор і нечіткий логічний регулятор НРЛ
19