
Page 240 - 70
P. 240
3 3
x f ( x k) 3 x k 4 x , x f ( x ) k 3 x k 4 x . (6.48)
2
2
1
1
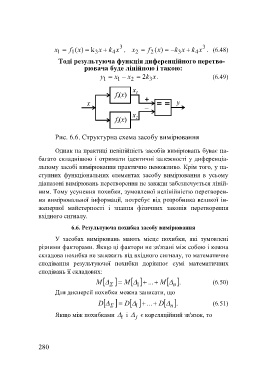
Тоді результуюча функція диференційного перетво-
рювача буде лінійною і такою:
y x x k 2 3 . x (6.49)
1
1
2
Рис. 6.6. Структурна схема засобу вимірювання
Однак на практиці нелінійність засобів вимірювань буває на-
багато складнішою і отримати ідентичні залежності у диференціа-
льному засобі вимірювання практично неможливо. Крім того, у на-
ступних функціональних елементах засобу вимірювання в усьому
діапазоні вимірювань перетворення не завжди забезпечується ліній-
ним. Тому усунення похибки, зумовленої нелінійністю перетворен-
ня вимірювальної інформації, потребує від розробника великої ін-
женерної майстерності і знання фізичних законів перетворення
вхідного сигналу.
6.6. Результуюча похибка засобу вимірювання
У засобах вимірювань мають місце похибки, які зумовлені
різними факторами. Якщо ці фактори не зв'язані між собою і кожна
складова похибка не залежить від вхідного сигналу, то математичне
сподівання результуючої похибки дорівнює сумі математичних
сподівань її складових:
M M ... M . n (6.50)
1
Для дисперсії похибки можна записати, що
D D ... D . n (6.51)
1
Якщо між похибками і є кореляційний зв'язок, то
j
i
280