
Page 17 - 6028
P. 17
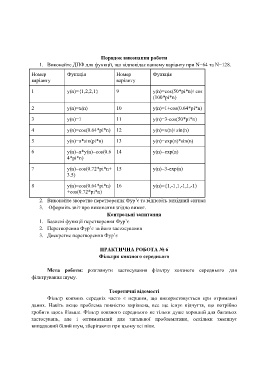
Порядок виконання роботи
1. Виконайте ДПФ для функції, що відповідає вашому варіанту при N=64 та N=128.
Номер Функція Номер Функція
варіанту варіанту
1 y(n)={1,2,2,1} 9 y(n)=cos(50*pi*n)+cos
(100*pi*n)
2 y(n)=x(n) 10 y(n)=1+cos(0.64*pi*n)
3 y(n)=1 11 y(n)=3-cos(50*pi*n)
4 y(n)=cos(0.64*pi*n) 12 y(n)=x(n)+sin(n)
5 y(n)=n*sin(pi*n) 13 y(n)=exp(n)*sin(n)
6 y(n)=n*y(n)=cos(0.6 14 y(n)=exp(n)
4*pi*n)
7 y(n)=cos(0.72*pi*n+ 15 y(n)=3-exp(n)
3.5)
8 y(n)=cos(0.64*pi*n) 16 y(n)={1,-1,1,-1,1,-1)
+cos(0.72*pi*n)
2. Виконайте зворотне перетворення Фур’є та відновіть вихідний сигнал
3. Оформіть звіт про виконання згідно вимог.
Контрольні запитання
1. Базисні функції перетворення Фур’є
2. Перетворення Фур’є та його застосування
3. Дискретне перетворення Фур’є
ПРАКТИЧНА РОБОТА № 6
Фільтри ковзного середнього
Мета роботи: розглянути застосування фільтру ковзного середнього для
фільтрування шуму.
Теоретичні відомості
Фільтр ковзних середніх часто є першим, що використовується при отриманні
даних. Навіть якщо проблема повністю вирішена, все ще існує відчуття, що потрібно
зробити щось більше. Фільтр ковзного середнього не тільки дуже хороший для багатьох
застосувань, але і оптимальний для загальної проблематики, оскільки зменшує
випадковий білий шум, зберігаючи при цьому всі піки.