
Page 32 - 4698
P. 32
Рухомий блок 1 у точці О 1 приєднаний до штоку гідравлічного циліндра 2,
який переміщується вгору під дією рушійної сили F p. Через блок перекинута
гнучка ланка – канат 3, який з одного боку кріпиться до нерухомої ланки, а з
іншого до рухомої платформи 4. Виграш у переміщенні або швидкості демонструє
план швидкостей показаний на рисунку 3.2б. У точці А канат прилягає до блока і
його швидкість рівна 0. Вісь рухомого блока (точка О 1) переміщується з деякою
швидкістю V , а блок починає обертатись відносно точки А і, таким чином, блок
O
1
у точці Б, а разом з ним і канат рухається з швидкістю 2V , або здійснює
O
1
переміщення s C 2s . Для швидкісного поліспасту завжди і п < 1.
O
1
Найпростіші схеми силового та швидкісного поліспастів дозволяють
змінити силу або зусилля вдвічі, для більшого виграшу поліспасти додатково
оснащуються більшою кількістю рухомих блоків, а для направлення каната між
блоками додатково встановлюються нерухомі блоки.
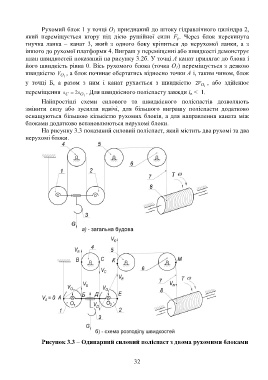
На рисунку 3.3 показаний силовий поліспаст, який містить два рухомі та два
нерухомі блоки.
Рисунок 3.3 – Одинарний силовий поліспаст з двома рухомими блоками
32